Introduce
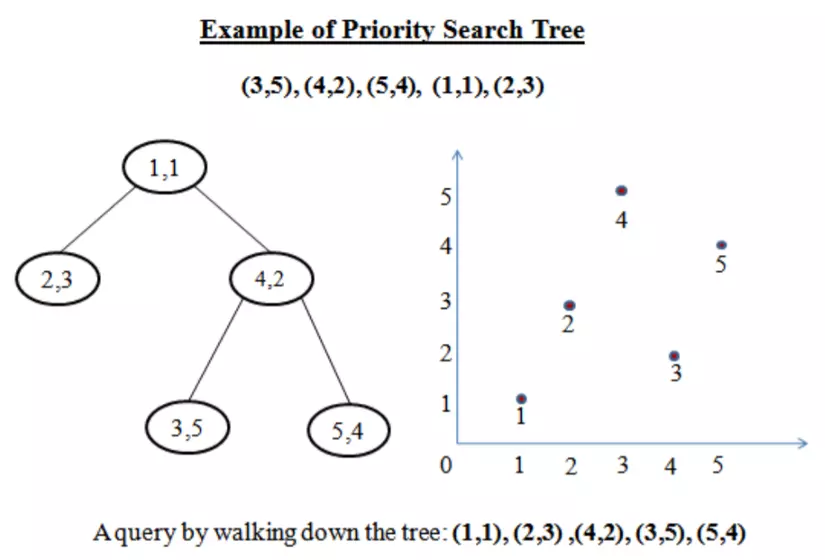
In computer science, priority search trees is a tree data structure for storing points in two-dimensional space (Oxy). The priority search tree was originally introduced by Edward McCreight in 1985 . The priority search tree is initially an extension of the priority queue with the aim of improving search time from: O ( n ) O (n) O ( n ) comes O O O ( S S s + l o g n log n l o g n ) where n is the number of points in the tree and s is the number of the total points returned by the search. Then, the priority lookup tree is used to store a set of 2-dimensional points sorted by priority and by a key value. This is done by creating a combination of a priority queue and a binary search tree . The result is a tree where each node represents a point in the original data set. The score contained by the node is the one with the lowest priority. In addition, each node contains a key value that is used to divide the remaining points (usually the median of the keys, regardless of the node’s score) into a left and right subtree. The points are divided by comparing their key values with the node key, delegating lower key values to the left subtree, and larger values for the right subtree.
Figure 1: Example of a preferred search tree:
How to build a PST tree
The preferred lookup tree is a data structure that stores points in a 2-dimensional space. First, we consider n points on the same plane, each with the x and y coordinates shown in Figure 2. The problem of constructing the preferred search tree is described as follows: Input : We have n points in the plane S S S = { p i p_ {i} p i │ i = first , 2 , 3 … n i = 1,2,3… n i = 1 , 2 , 3 … n } and points pi ( pi.x , pi.y ) p_i (p_i.x, p_i.y) p i (P i . x, p i . y ) . Output: The search tree prioritizes to store points in 2-dimensional space.
Sequence:
- If S = NULL, NULL is returned.
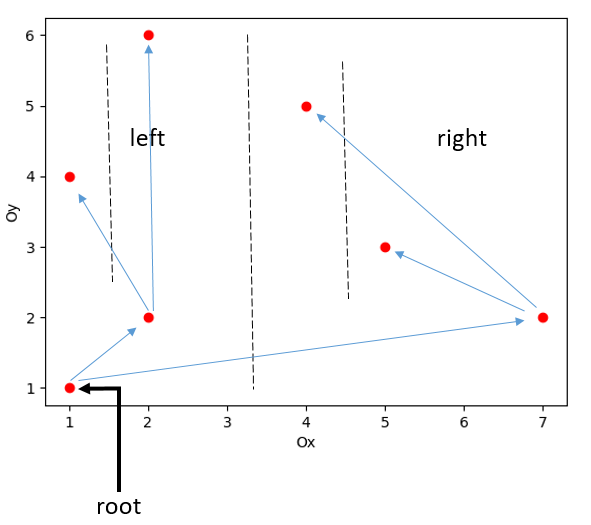
- Find the point p i p_ {i} p i has the smallest y-coordinate set as root, p i p_ {i} p i = min p i p_ {i} p i .y ∊S}
- Find the median dividing points to the left and right. On the left side look for points p i p_ {i} p i = min { p i p_ {i} p i .y ∊ S l S_l S l { p p a r e n t p_ {parent} p r e p a n t }} assign as the child of the parent node in step 2 , do the same with the right side shown in Figure 3 .
- Recursively recursive PST (s) with the left side.
- Recursively recursive PST (s) with right side.
- End.
Figure 2: Representation of points on the oxygen plane
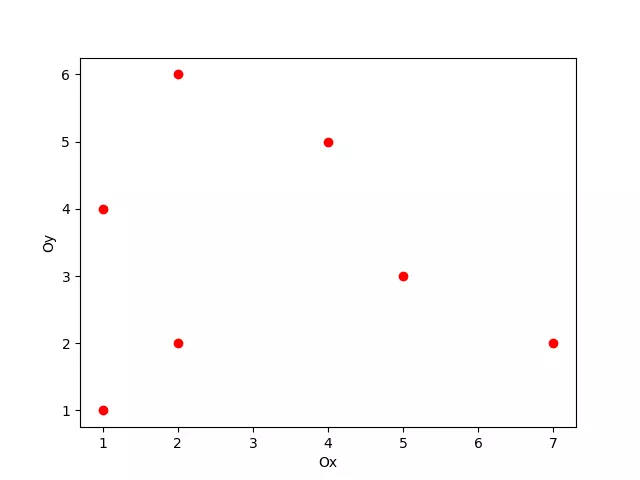
Figure 3: Description of PST tree construction
Decoding code is written in pascal:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 | procedure construct_PST(RPSTPtr): CONST k = 30000, FirstKey = 0, LastKey = k - 1; FirstNonKey = LastKey + 1; TYPE KeyRange First_Key… Last_Key; KeyBound First_Key… FirstNonKey; Pair= RECORD x, y: KeyRange END; RPSTPtr = RPST; RPST=RECORD p: Pair; left, right: RPSTPtr END; |
Add a new node to the tree
Next comes the problem of adding a new node to the tree. Suppose there is a new node with coordinates x n e w x_ {new} x n e w and y n e w y_ {new} y n e w need to be added to the tree. Thus, we will need to recalculate if there is a change in the root and the medians. It then compares whether the new node can be inserted in the stump or the nodes on the left and right sides.
The pascal decoder adds a new node to the tree:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 | PROCEDURE InsertPair(VAR t: RPSTPtr; newPr: Pair; lowerX: KeyRange; upperX: KeyBound); VAR p: Pair; middleX: KeyRange BEGIN IF t NIL THEN BEGIN NEW(t); (* tao nut tren cay *) t.p := newPr; t.left := NIL; t.right := NIL; END ELSE IF t.p.x <> newPr.x (* gia su bien x la du nhat *) THEN BEGIN IF newPr.y < t.p.y THEN (* neu y_new < y_old *) BEGIN p := t.p; t.p := newPr END (*tao nut moi*) ELSE p := newPr; middleX := (lowerX+upperX) DIV 2; IF p.x < middleX THEN InsertPair(t.left, p, lowerX, middleX) ELSE InsertPair(t.right, p, middleX, upperX); END; (* neu nut da ton tai thi khong them *) END; (* ket thuc ") |
Delete the node from the tree
Next comes the problem of adding a new node to the tree. Suppose there is an old node with coordinates x o l d x_ {old} x o l d and y o l d y_ {old} y o l d need to be removed from the tree. Thus, we need to recalculate if there is a change in the stump, the parent nodes, the medians and update the tree again.
The pascal decoder removes a node from the tree:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 | PROCEDURE DeletePair(VAR t: RPSTPtr; oldPr: Pair; lowerX: KeyRange; upperX: KeyBound); VAR middleX: KeyRange BEGIN IF t <> NULL THEN BEGIN IF t.p.x == oldPr.x (* co duy nhat 1 bien x *) THEN BEGIN (* tim vi tri can xoa *) IF t.left <> NULL THEN BEGIN IF t.right <> NULL THEN BEGIN (* nut o ben trai hoac ben phai cua cay con *) IF t.left.p.y < t.right.p.y THEN BEGIN (* nut o ben trai *) t.p := t.left.p; DeletePai r( t.left, t.p, lowerX, upperX); END ELSE BEGIN (* nut o ben phai *) t.p := t.right.p; DeletePair(t.right, t.p, lowerX, upperX); END; END ELSE BEGIN (* nut chi o ben trai *) t.p := t.left.p; DeletePair(t.left, t.p, lowerX, upperX); END; END ELSE BEGIN IF t.right <> NULL THEN BEGIN (* nut chi o ben phai *) t.p := t.right.p; DeletePair(t.right, t.p, lowerX, upperX); END ELSE BEGIN (* nut khong co cay con *) DISPOSE(t); t := NIL; END; END; END ELSE BEGIN (* xoa nut khoi cay con *) middleX := (lowerX+upperX) DIV 2; IF oldPr.x < middleX THEN DeletePair(t.left, oldPr, lowerX, middleX) ELSE DeletePair(t.right, oldPr, middleX, upperX); END; END; (* ELSE nut này khong co trong cay nen khong the xoa *) END; (* ket thuc *) TYPE CondPair RECORD valid: BOOLEAN; p: Pair; END; |
Query points in the tree
Next, let’s look at tree search. The preferred search tree can help find points that satisfy conditions on the oxygen plane, which is different from a binary search tree (BST) that searches only 1 point in the tree. When searching, we need to define the search scope in the form of limited rectangles x m i n x_ {min} x m i n and x m a x x_ {max} x m a x and priority y. In the figure below consider the problem of finding points on the search tree with priority y m a x y_ {max} y m a x as original.
Figure 4: Description of the search scope
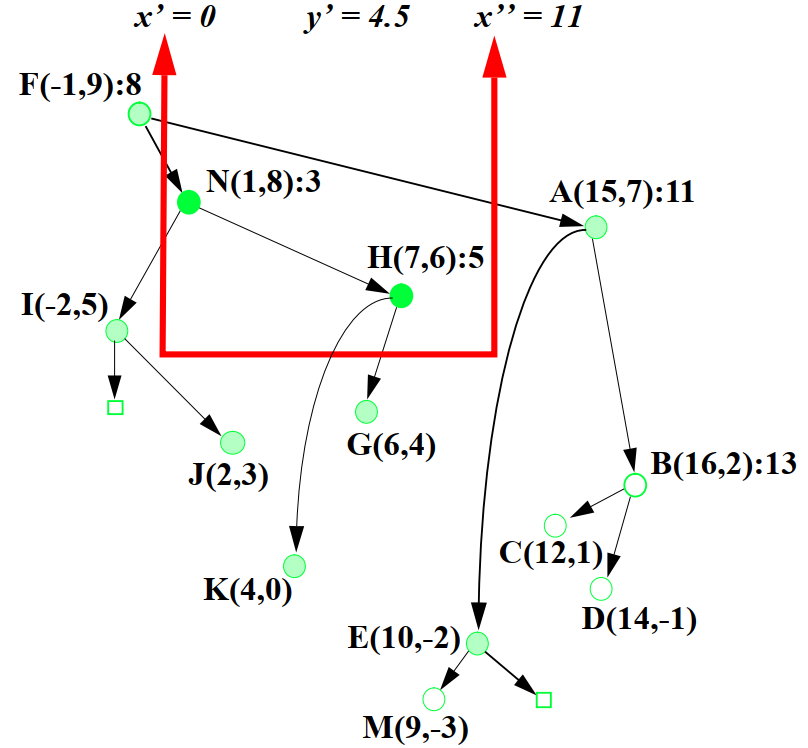
Figure 5: Description of search method
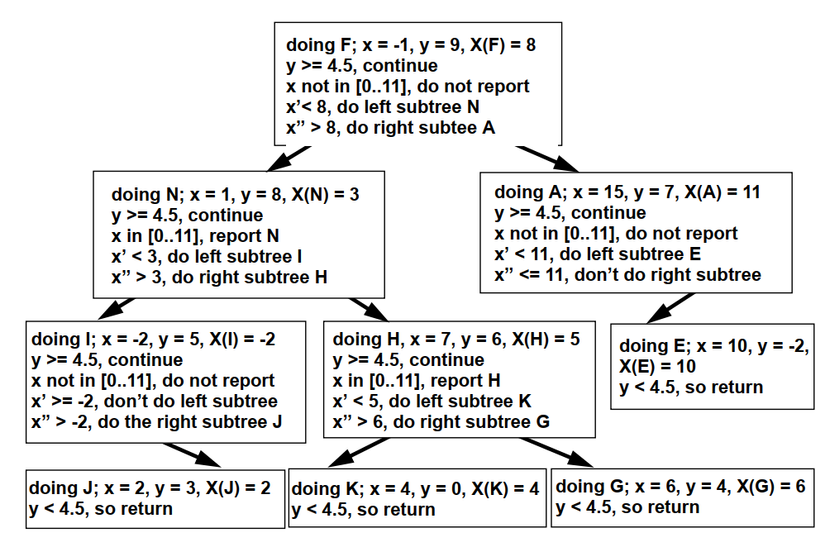
Decode the search algorithm pascal:
1 2 3 4 5 6 7 8 9 10 11 12 | procedure PST( tree, x_min, x_max, y_p): IF tree <> NULL THEN IF y_p > tree.node.y THEN IF tree.node.x >= x_min AND tree.node.x <= x_max THEN report tree.node; IF x_min < tree.node.middleX THEN PST(tree.left, x_min, x_max, y_p); IF x_max > tree.node.middleX THEN PST(tree.left, x_min, x_max, y_p); ELSE END; ELSE END; |
Implementation algorithm with Python:
1 2 3 4 5 6 7 8 9 10 11 12 | def query_priority_search_tree(tree, x_min, x_max, y_priority): if tree is None: return if y_priority < tree.node.y: return if tree.node.x in range(x_min, x_max + 1): result_query.append(tree.node.name) if x_min < tree.node.middleX: query_priority_search_tree(tree.left, x_min, x_max, y_priority) # tim ben trai if x_max > tree.node.middleX: query_priority_search_tree(tree.right, x_min, x_max, y_priority) # tim ben phai |
The problem of finding the point with the smallest y
The problem is finding a point with the smallest y-coordinate in a given rectangular range on the oxygen plane. With the naked eye, we can immediately see the desired point in the range with the small number of points in the plane. If you find sequentially comparing each point with each other, the complexity of the algorithm will be O ( n ) O (n) O ( n ) . Therefore, we use a preferred search tree data structure to perform searches with word complexity O ( n ) O (n) O ( n ) comes O O O ( S S s +lognlog nl o g n ).
Algorithm code:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 | FUNCTION MinYlnXRange(t: RPSTPtr; xO, xl: KeyRange; lowerX: KeyRange; upperX: KeyBound): CondPair; VAR c, cRight: CondPair; middleX: KeyRange BEGIN IF t <> NIL THEN IF (xO <= t.p.x) AND (t.p.x <= xl) THEN (" pham vi tim kiem ") BEGIN c.valid := TRUE; c.p := t.p; END ELSE BEGIN middleX := (lowerX+upperX) DIV 2; IF xO < middleX THEN c := MinYlnXRange(t.left, xO, xl, lowerX, middleX) ELSE c.valid := FALSE; IF middleX <= xl THEN cRight := MinYlnXRange(t.right, xO, xl, middleX, upperX) ELSE cRight.valid := FALSE; IF NOT c.valid OR (cRight.valid AND (cRight.p.y < c.p.y)) THEN c := cRight; END ELSE c.valid := FALSE; (" cay con rong ") MinYInXRange := c; END: (" ket thuc ") |
The problem of finding the point with the largest x
The problem is finding a point with the largest x coordinate in a given rectangular range on the oxygen plane. With the naked eye, we can immediately see the desired point in the range with the small number of points in the plane. If you find sequentially comparing each point with each other, the complexity of the algorithm will be O ( n ) O (n) O ( n ) . Therefore, we use a preferred search tree data structure to perform searches with word complexity O ( n ) O (n) O ( n ) comes O O O ( S S s +lognlog nl o g n ).
Algorithm code:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 | FUNCTION MaxXlnRectangle(t: RPSTPtr; xO, xl, yl: KeyRange; lowerX: KeyRange; upperX: KeyBound): CondPair; VAR c: CondPai r; middleX: KeyRange BEGIN IF t <> NIL THEN BEGIN IF t.p.y > yl THEN (* Khong co nut nao trong cay con nay nam trong tim kiem *) c.valid := FALSE ELSE BEGIN middleX := (lowerX+upperX) DIV 2; IF middleX < xl THEN (* ket qua chi o cay con phai*) c := MaxXInRectangle(t.right, xO, xl, yl, middleX, upperX) ELSE c.valid := FALSE; IF (NOT c.valid) AND (xO <= middleX) THEN (* ket qua chi o cay con trai *) c := MaxXlnRectangle(t.left, xO, xl, yl, lowerX, middleX); IF (xO <= t.p.x) AND (t.p.x <= xl) AND ((NOT c.valid) OR (c.p.x < t.p.x)) THEN (* t.p is best of all in the search rectangle *) BEGIN c.valid := TRUE; c.p := t,.p; END; END END ELSE c.valid := FALSE; (* cay con rong *) MaxXInRectangle := c; END; (* ket thuc *) |
Download the source code
See the entire source code in python at github
Refer
[1] McCreight, Edward (May 1985). “Priority search trees”. SIAM Journal on Scientific Computing.
[2] DT Lee. “Interval, Range, and Priority Search Tree”. Academia Sinica.
[3] Dina Q Goldin Karon (March 8, 1993). “Priority Search Tree”. Computational Geometry.